Kalman Filter - Test preview
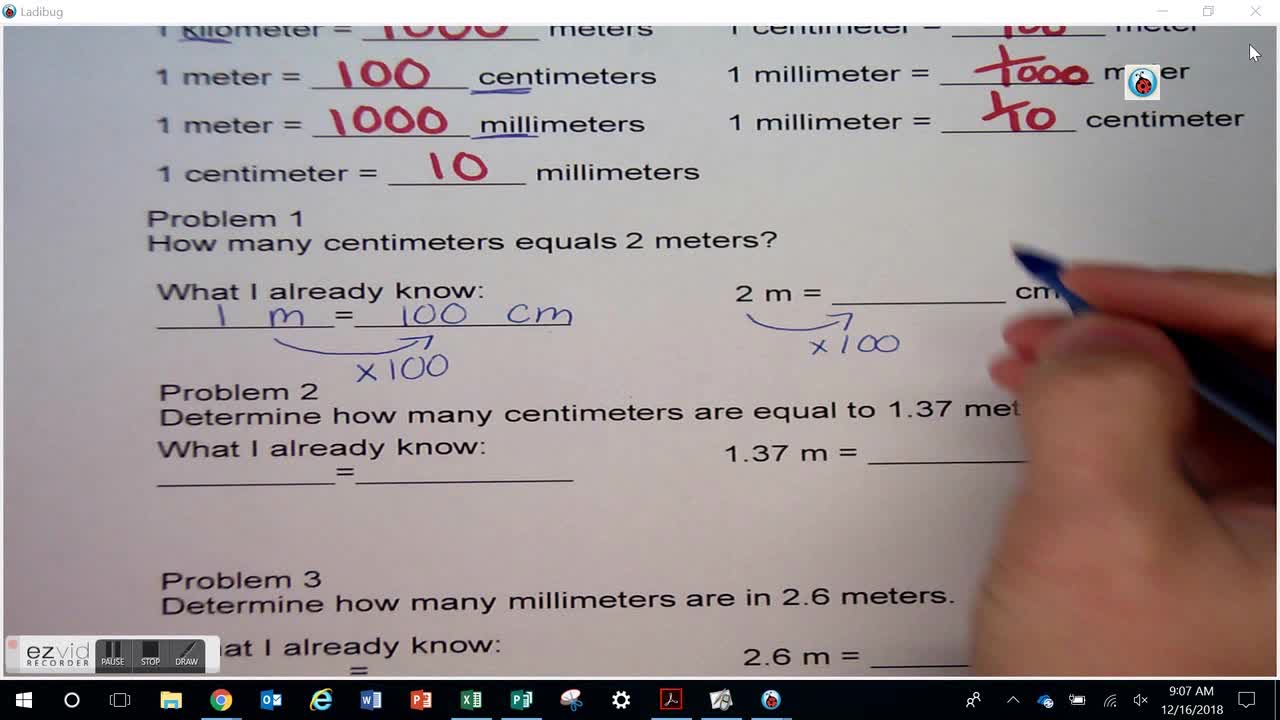
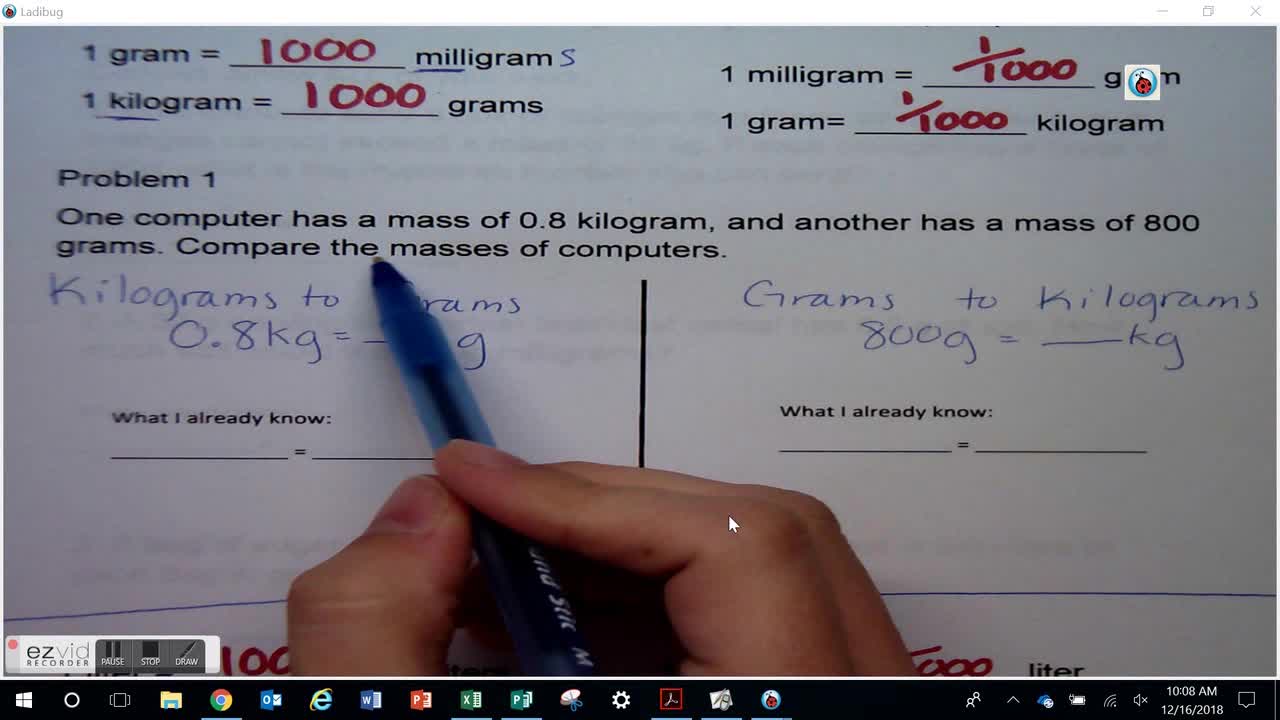
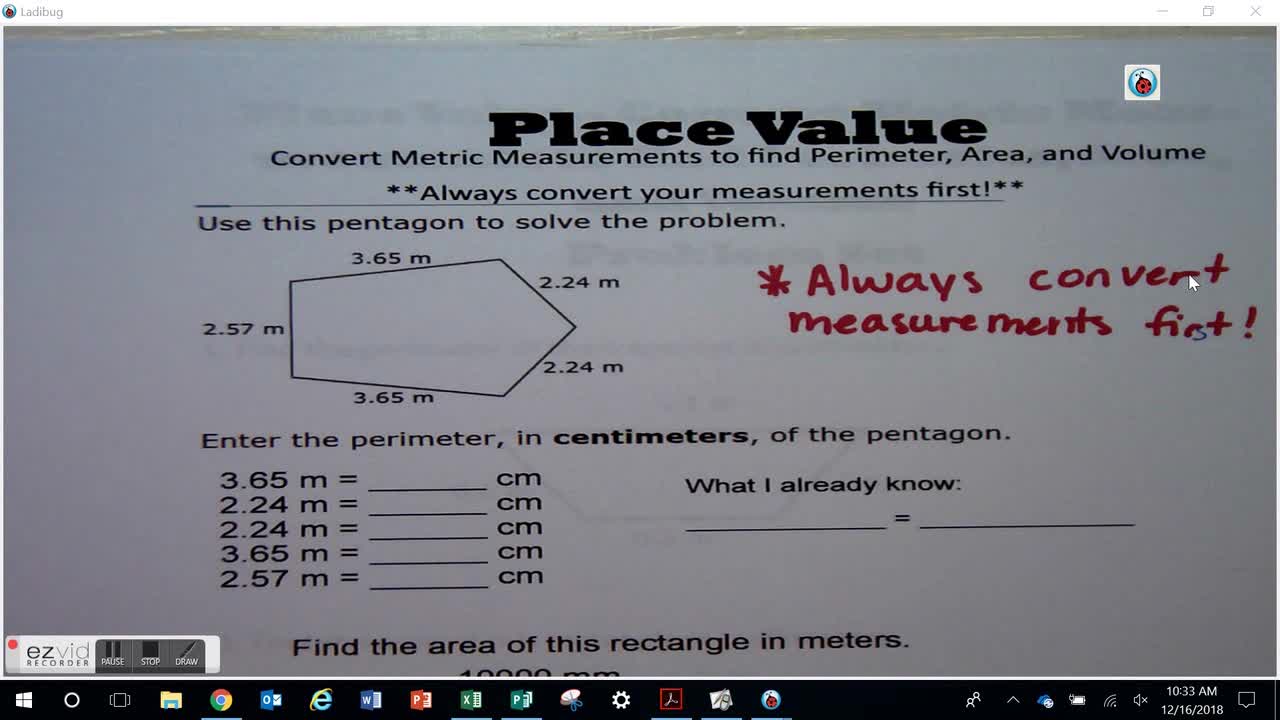
Elementary / Math / Measurement
Kalman filter test. Multiple filter tests using variable additive white gaussian noise on a sinusoidal signal. 6-level Kalman filter adapted to motion tracking, smoothing and prediction. A defined 6x6 Transition matrix to achieve the next state (Taking into account Position-Velocity-Acceleration-Jerk-Jounce-Crackle). The control vector and the input matrix were not used in this case. The value of measurement noise depends on the variance. Implementation with a reduced amount of matrix in order to: -Eliminate redundant multiplications by 0 or 1 -Acceleration of the process of calculating optimal gains -Observe one state (matrix inversion reduced to 1/value) -Optimal gains are recalculated only when the value of key variables changes. Signal generation : 60 Hz Process noise variable : 1.0-0.0